Urban roads are intricate and intertwined, and traffic lights are an important command system for urban traffic. As an effective means to control traffic flow and improve road traffic capacity, traffic lights have obvious effects on reducing traffic accidents. However, the traffic volume is changing at any time, while the traditional traffic light mode uses timing control, which is easy to cause traffic jams. Therefore, we need to set the transit time according to different traffic conditions. This paper uses fuzzy control algorithm to design an intelligent traffic light monitoring system.
1, the overall plan
The traffic light monitoring system is a distributed, distributed, and networked monitoring system, including a monitoring center and several intelligent monitoring terminals, capable of centralized monitoring and maintenance management of independently distributed traffic lights. Each intersection is seen as a monitoring terminal, each with a collector and a GPRS module, and a controller is installed in each direction. The controller is used to directly control the status of the traffic light, the time display, and obtain the vehicle information of each lane; the collector is used to acquire data of each controller of the subordinate and send a control command. The collector sends the collected data to the monitoring center through the GPRS network, and analyzes the data in the monitoring center to realize the monitoring of the road condition. Here, the fuzzy control algorithm is used to analyze the vehicle data to realize the control of the traffic lights.
2, fuzzy control algorithm design
Fuzzy control is the use of people's long-term experience as a control strategy, and it is transformed into a machine-recognizable natural language to achieve automatic control. In the paper, the man-transformed traffic command strategy language is transformed into the control algorithm described by machine language, which makes the algorithm can simulate the human mind to analyze the time allocation problem of each lane well, so as to realize the variable control of the traffic light time. For a crossroad, a cycle is divided into four phases, as shown in Figure 1 (1: east to west, west to east, west to south, east to north; 2: west to north, east to south; 3: South to North, North to South, South to East, North to West; 4: North to East, South to West).
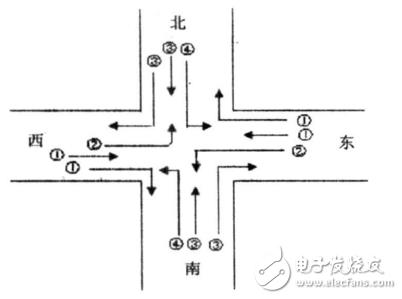
Figure 1 Crossroads
2.1, input and output variable definition
The linguistic variables of fuzzy control are for input variables and output variables. They are natural language forms, not variables given in numerical form. The current phase waiting vehicle average and the next phase vehicle waiting average are selected as input variables. The current phase green light delay time is the output language variable, so that a two-input single-output two-dimensional fuzzy controller is selected, as shown in FIG. 2 .
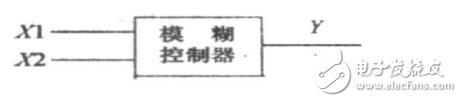
Figure 2 Dual input single output model
In the figure, X1: the current total number of vehicles / number of lanes (rounded);
X2: total number of vehicles in the next phase / number of lanes (rounded);
Y: The current phase green light shows the time.
2.2, variable settings
(1) Input amount: X1 and X2.
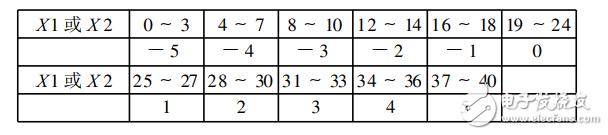
The basic domain of the average number of vehicles waiting is determined as [0, Qmax], and Qmax is the maximum number of waiting vehicles that can be accepted. According to the actual situation and road conditions, 40 is selected here. The domain is the quantized number of linguistic variables, and the domain that waits for the average number of vehicles is determined as {-5,-4,-3,-2,-1,0,1,2,3,4,5}, input A comparison table between the basic domain and the discrete domain of the linguistic quantity is shown in Table 1.
Table 1: Basic domain and discrete domain conversion table for the average number of vehicles input
(2) Output: Y, the current phase green light delay time.
The basic domain of the green light delay time is determined as [Gmin, Gmax], Gmin is the acceptable minimum green light delay time, and Gmax is the acceptable maximum green light delay time. Here, Gmin=0s, Gmax=60s is set. . The domain of the green light delay time is determined as {0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12}. Since the output delay time is continuous, there is a scaling factor K=60/12=5, which is defuzzified by the scaling factor, resulting in an accurate delay time:
Delay time = K&mes; fuzzy set data
2.3, membership function
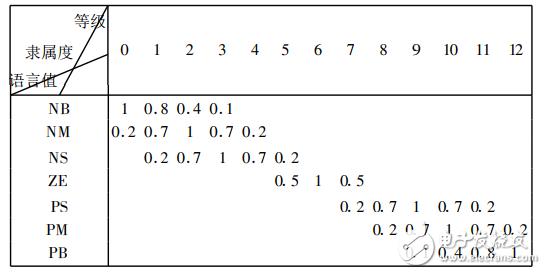
In the text, the linguistic variables of X and Y are selected from 7 language values, "rare" - "NB", "less" - "NM", "less" - "NS", "normal" - "ZE", " More" - "PS", "more" - "PM", "many" - "PB".
According to the membership function, an assignment table of the corresponding language variable can be established. The determination of the membership function is generally determined based on experience or statistics, and can also be given by experts and authorities. Table 2 and Table 3 give the assignment tables for the respective language variables of the input and output.
Table 2 Language variable assignment table for input quantity X
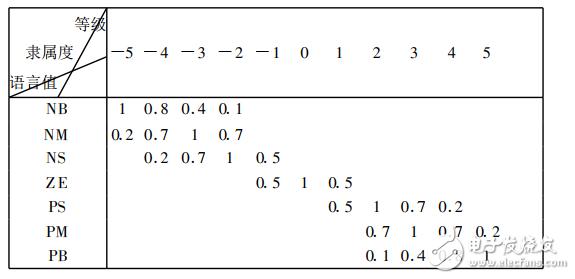
Table 3 Language variable assignment table for output Y
2.4, fuzzy reasoning
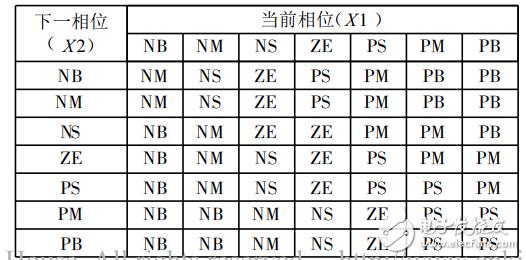
Since the number of fuzzy rules is higher, the speed of reasoning is slower, so only the average number of vehicles in each phase is considered, which does not affect the actual control effect. Because of the two-dimensional fuzzy controller, the following control rules are used:
IF A AND B THEN C
It can be seen that there are a total of 49 control rules. Thus, a fuzzy control rule table is obtained, as shown in Table 4. Each control rule corresponds to an algorithm, and the fuzzy relation Ri is obtained, and all of them are combined to obtain a total fuzzy relationship R, then:
C=(A&TImes;B)★R
Table 4 Control Rule Table
2.5, fuzzy decision
There are three commonly used decision methods: the maximum membership method, the median method, and the weighted average method. The weighted average method is used here. To choose the appropriate weight coefficient, the membership degree is generally taken as the weight coefficient. So its formula is:
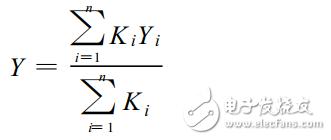
Among them, Ki is the weight coefficient, where is the membership degree, and Yi is the element in the domain. From this, the output can be obtained and further defuzzified to obtain an accurate output.
2.6, summary
For convenience, through the above steps, the query table is first established offline, and stored in the computer, that is, the process of fuzzification, fuzzy reasoning, and clearing is realized by programming first, and then the control query table is established, and the query table is directly passed in real time. The corresponding output is available. In the real-time control process, the fuzzy control process is transformed into a process of querying the query table with a small amount of calculation. Therefore, the fuzzy control implemented in the form of the lookup query table has good real-time performance and meets the requirements of on-site control.
In order to make road traffic smoother, yellow flash should be used, and the cycle of the lamp should not be too long, so as to avoid the driver waiting for fatigue. The data is generally collected during the yellow flash, and the delay command is released before the yellow flash ends.
3. Simulation experiment
The speed of the intersection should be slowed down. The speed of the vehicle aisle during the green light is about 10~15km/h, and the crossing is 15m. Let the current situation be as shown in Table 5.
Table 5 Current situation
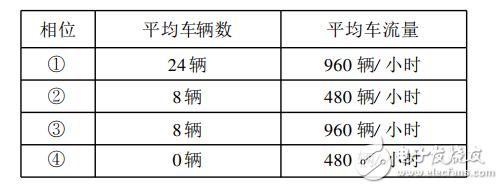
With fixed timing: 2 minutes for each phase, 30 seconds for each phase, then up to 25 vehicles per lane during the green light. At the end of a cycle, the average number of vehicles in each phase is shown in Table 6.
Fuzzy control is used: the period is 2 minutes, and the table look is: 1 phase green time is 42s; 2 phase green time is 18s; 3 phase green time is 42s; 4 phase green time is 18s. After the end of one cycle, the average number of vehicles in each phase is shown in Table 6.
Table 6 Phase of each phase after one cycle

It can be seen from Table 6 that the traffic jam with a large traffic flow at a fixed time is prone to traffic jam, and the time allocated for a lane with a small traffic volume is not fully utilized, which reduces the traffic efficiency at the intersection. With fuzzy control and dynamic timing, each phase has a small difference from the original state after one cycle, which reduces the number of vehicles with large traffic flow and avoids the tendency of traffic jam. For lanes with small traffic volume, make full use of the vehicle. The time allocated, in general, the utilization of time is increased, thereby increasing the efficiency of intersections.
4 Conclusion
The use of fuzzy control in the traffic light control system solves the problem of how to adjust the state of the traffic light according to the traffic condition, thereby realizing the variable control of the traffic and maintaining the traffic efficiency of the road. It can control the traffic more effectively than the fixed time.
HT Wire,HT Spiral Wire,7Mm Prestressed Steel Wire,Spiral Ribs HT PC Steel Wire
Shandong Xindadi Holding Group Co., Ltd , https://www.xindadipcwire.com